ドローン空撮×AI画像認識で検知した牧草地の雑草を ピンポイント除草する実証実験を開始
NTTコミュニケーションズ株式会社(以下 NTT Com)は、農事組合法人 清和農場(以下 清和農場)および共同実証機関であるホクレン農業協同組合連合会(以下 ホクレン)、株式会社ビコンジャパン(以下 ビコンジャパン)、ホクサン株式会社(以下 ホクサン)、釧路丹頂農業協同組合(以下 JAくしろ丹頂)とともに、牧草の生産において大きな課題となっている雑草を、ドローン空撮画像およびAI画像認識技術で検知するとともに、セクションコントロールスプレーヤーや農薬散布ドローン、小型農薬散布ロボットといった最新機器を活用し、ピンポイントで除草する新技術の実証実験(以下 本実証実験)を開始します。本実証実験は、国立研究開発法人農業・食品産業技術総合研究機構(以下 農研機構)が公募した「戦略的スマート農業技術の実証・実装」において選定され、取り組むものです。

<農薬のピンポイント散布の様子 (左)セクションコントロールスプレーヤー(右)小型農薬散布ロボット>
1.背景
牛の飼料となる牧草の生産において、雑草は牧草の生育を阻害するだけでなく、乳牛が誤って口にすることにより搾乳量の低下につながることから、大きな課題となっています。
この課題に対し、NTT Comはこれまでにもドローン空撮画像およびAI画像認識による雑草検知などに取り組み、高い精度で雑草を検知することに成功しています。
一方で、検知した雑草への対策においては、広大な牧草地全体への農薬散布や人手によるピンポイント散布など対処方法が限られており、農薬のコストや散布する稼働の面から対策が難航しています。このため、今回、検知した雑草に対し、セクションコントロールスプレーヤーや農薬散布ドローン、小型農薬散布ロボットといった最新機器を活用し、雑草が繁茂しているエリアにピンポイントで自動農薬散布を行う技術の確立に向け、6者は本実証実験に取り組みます。
雑草にピンポイントで自動農薬散布が可能となることで、除草にかかる農薬コストや散布稼働の大幅な削減が期待できます。
2.実施内容
(1) ドローン空撮画像およびAI画像認識技術を用いた牧草地の雑草検出・位置特定実験
(2) 部分散布可能な作業機械を用いた特定エリアに対する自動農薬散布による除草実験
本実証実験の具体的な取り組み内容は、別紙をご参照ください。
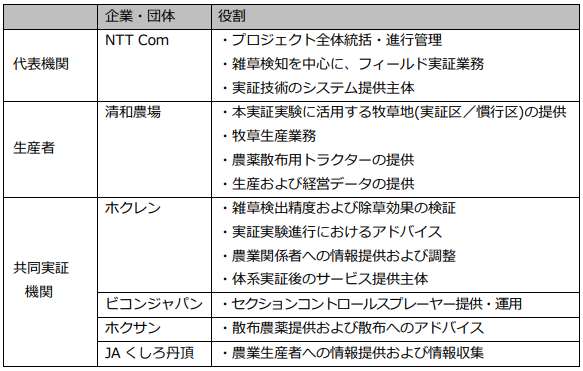
3.各者の役割

4.本実証実験実施場所
清和農場(住所:北海道阿寒郡鶴居村字雪裡原野北二十一線72)
5.今後について
本実証実験を通じて得られた知見をもとに、早期のサービス提供をめざします。
また、デジタル技術の活用による農業DXを実現することで、人手不足や収益向上をはじめ、一次産業におけるさまざまな課題の解決に取り組みます。